Módulo didáctico para la enseñanza del control de motores eléctricos en universidades tecnológicas y politécnicas.
Por José de Jesús Mendoza Osorio
Universidad Politécnica de Pénjamo, Ingeniería Mecatrónica, Pénjamo, Guanajuato, México.
ORCID 0009-0003-2711-4198
Rodrigo Vázquez Arias, Universidad Politécnica de Pénjamo, Ingeniería Industrial, Pénjamo, Guanajuato, México.
Javier Gutiérrez González. Universidad Politécnica de Pénjamo, Ingeniería Mecatrónica, Pénjamo, Guanajuato, México.
Carlos Daniel Vázquez Vargas, Universidad Politécnica de Pénjamo, Ingeniería Automotriz, Pénjamo, Guanajuato, México.
La enseñanza de control de motores de corriente alterna con dispositivos electromecánicos como relevadores, temporizadores, contactores, etc. Establecen las bases de la automatización en procesos industriales. Por ello, su enseñanza en las carreras como mecatrónica, mantenimiento industrial y afines en las Universidades Tecnológicas y Politécnicas (UTTyPP) es de gran importancia para la preparación de los estudiantes, pero desafortunadamente se ve afectada por la cantidad de material disponibles, número de estudiantes por grupo, así como habilidades técnicas para la conexión entre dispositivos, por lo que se propone un módulo de enseñanza que permite reducir hasta un 75% el tiempo de conexión por práctica contribuyendo con ello a una mejor enseñanza.
Palabras clave: Control de motores, relevadores, contactores, automatización, dispositivos electromecánicos.
Introducción
El presente artículo consta de la recopilación de datos obtenidos en la Universidad Politécnica de Pénjamo, a partir de la creación de un módulo para la enseñanza de control de motores eléctricos de corriente alterna, el prototipo fue creado y aplicado en tres instituciones de nivel superior: Universidad Tecnológica de Gutiérrez Zamora (UTGZ), Universidad Tecnológica de San Miguel de Allende (UTSMA) y en la Universidad Politécnica de Pénjamo (UPPE), en donde, se impartió la materia de control de motores a las carreras de Ingeniería en mantenimiento industrial en UTGZ e ingeniería mecatrónica en UTSMA y UPPE.
institución respectivamente. Logrando una reducción de tiempos de conexión significativa en algunas de las prácticas de hasta un 75%, permitiendo con ello, mejorar la enseñanza y lograr que los estudiantes adquieran la competencia del saber hacer. Las prácticas propuestas fueron las que propone Mendoza (s.f.) en su canal de YouTube.
Metodología
Con base en Erickson (2020) el control de motores “es un campo interdisciplinario que combina la teoría de control, la electrónica de potencia y la ingeniería de sistemas” (p.3), aunque en este artículo el enfoque es a través de dispositivos electromecánicos, los cuales la IEEE (2020) los describe como «Dispositivos que combinan componentes eléctricos y mecánicos para realizar funciones específicas, como controlar movimiento, convertir energía o realizar operaciones precisas» (p. 12), estos, son muy importantes para el control de procesos industriales y sientan las bases de la automatización y lenguaje COP. Desafortunadamente en algunas instituciones de educación media y superior, donde se imparten las carreras de ingeniería mecatrónica, electromecánica o mantenimiento industrial, no cuentan con el equipo necesario para la realización de prácticas que fortalezcan el saber hacer en las asignaturas de máquinas eléctricas o control de motores, generando una desventaja competitiva de los futuros egresados.
Aunado a esto, los salones son numerosos (entre 20 y 25 alumnos) y las sesiones de 50 a 100 minutos, lo que implica que no todos los estudiantes puedan realizar de manera individual las 12 prácticas propuestas para estas asignaturas, pues de manera tradicional el tiempo promedio de conexiones de prácticas va desde los 8 a 20 minutos, dependiendo de las habilidades de cada estudiante.
A su vez, el no contar con un módulo didáctico para el control de motores implica que los componentes se dañen en sus terminales de conexión por tornillos barridos, generando también gastos por mantenimiento y uso constante de consumibles como cable para las conexiones. Por ello, se propuso este proyecto que reduce hasta un 75% los tiempos de conexión, logrando tener más alumnos capacitados en esta área en menor tiempo y menor costo.
Desarrollo de los prototipos
En 2016 surge el primer prototipo para la enseñanza de control de motores en las instalaciones de la Universidad Tecnológica de Gutiérrez Zamora para la unidad 2 “motores de corriente alterna” de la asignatura máquinas eléctricas a 25 estudiantes de la carrera de TSU en mantenimiento industrial.
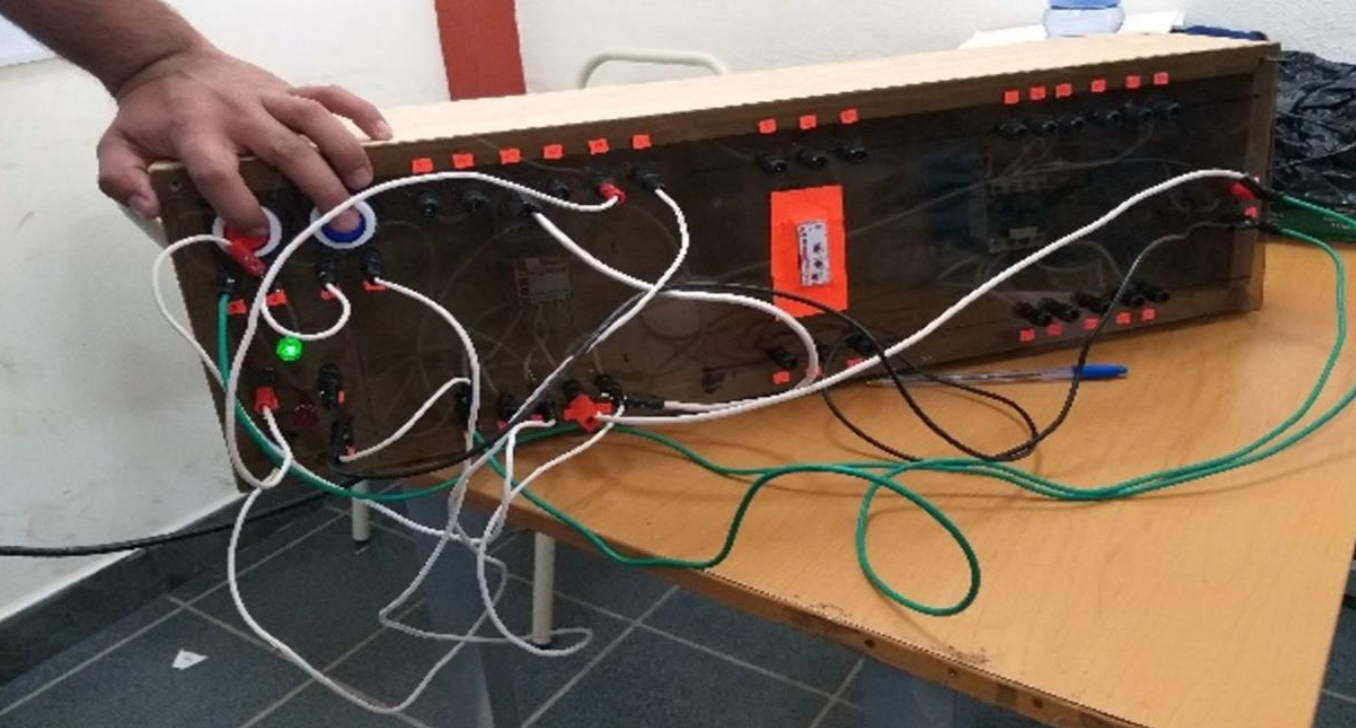
El primer prototipo consistía en un gabinete de madera de 75 cm de largo, 18 cm de alto y 15 cm de profundidad, la parte frontal estaba hecha de acrílico y en ella se encontraban distribuidas las terminales de conexión, dos botones pulsadores, dos lámparas piloto y sobresalía la superficie del temporizador y del interruptor de protección. De manera interna sobre riel DIN se encontraban montados un relevador, un contactor y un temporizador, permitiendo con ello la realización de 7 prácticas. Tal y como se observa en la figura 1.
Dentro de las desventajas que se encontraron en el primer prototipo fueron las dimensiones, pues este era demasiado largo y había espacios muertos, que podrían tener una mejor distribución, además de la limitación de solo poder realizar 7 prácticas. Estas fueron solventadas en el segundo prototipo.
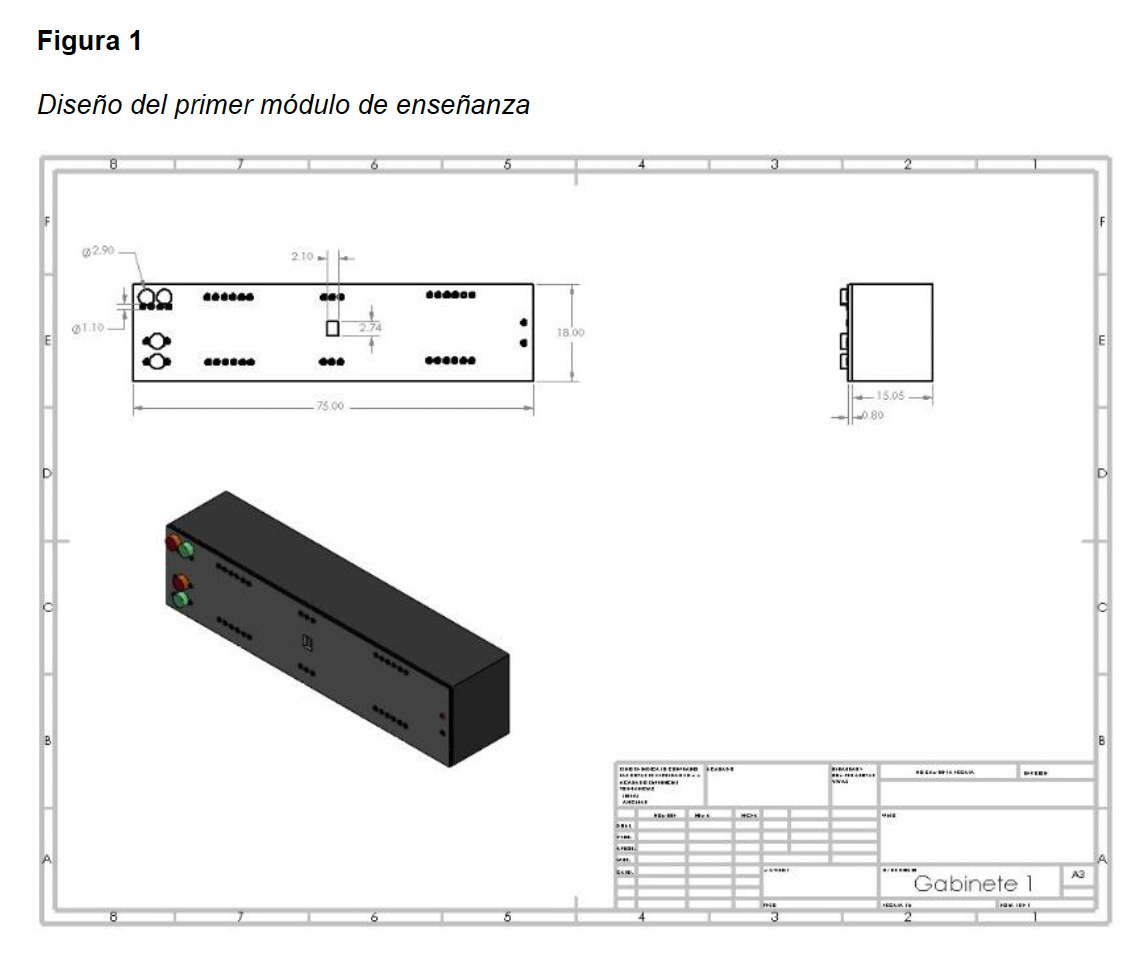
El prototipo 2, consistió en el mismo principio de fácil conexión a través de terminales hembra, se redujeron las dimensiones, siendo estas de 50 cm de largo, 21 cm de ancho y 25 cm de altura, añadiendo a su vez, un motor de corriente alterna monofásico para la realización del circuito de fuerza, se añadió una tercera lámpara piloto y un temporizador más, tal como se observa en la figura 2. Logrando así un total de 10 prácticas. Añadiéndose secuencia con temporizadores para lámparas piloto, secuencia con retardo a la conexión de motores, secuencia de retardo a la desconexión de motores y uso de temporizador para control de motor con lámparas piloto, a las prácticas ya existentes del prototipo 1.
Resultados
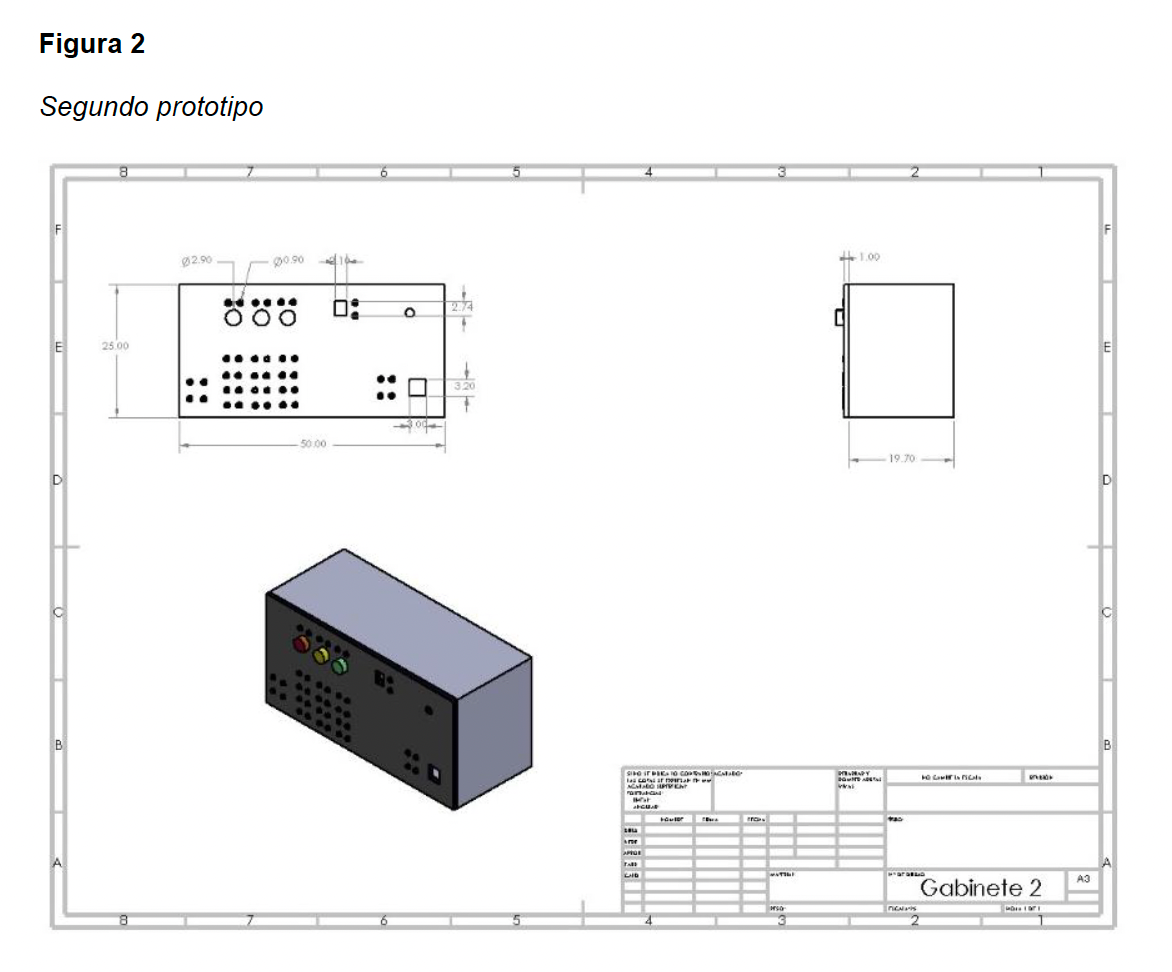
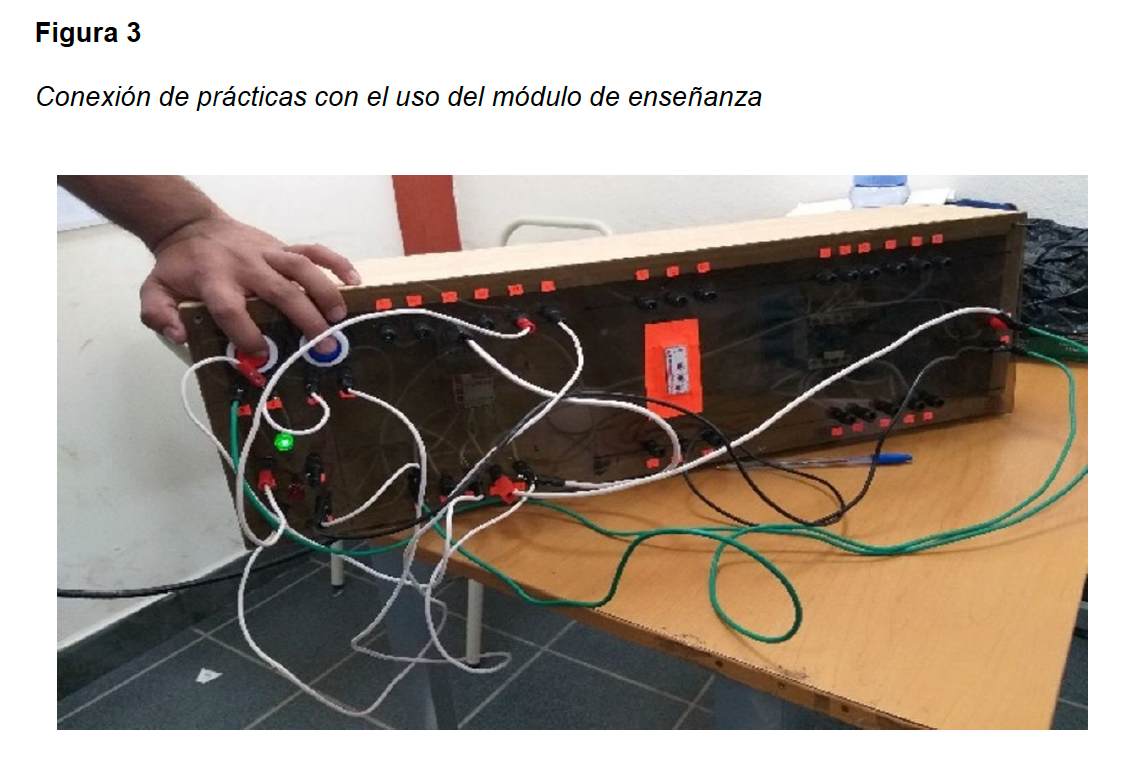
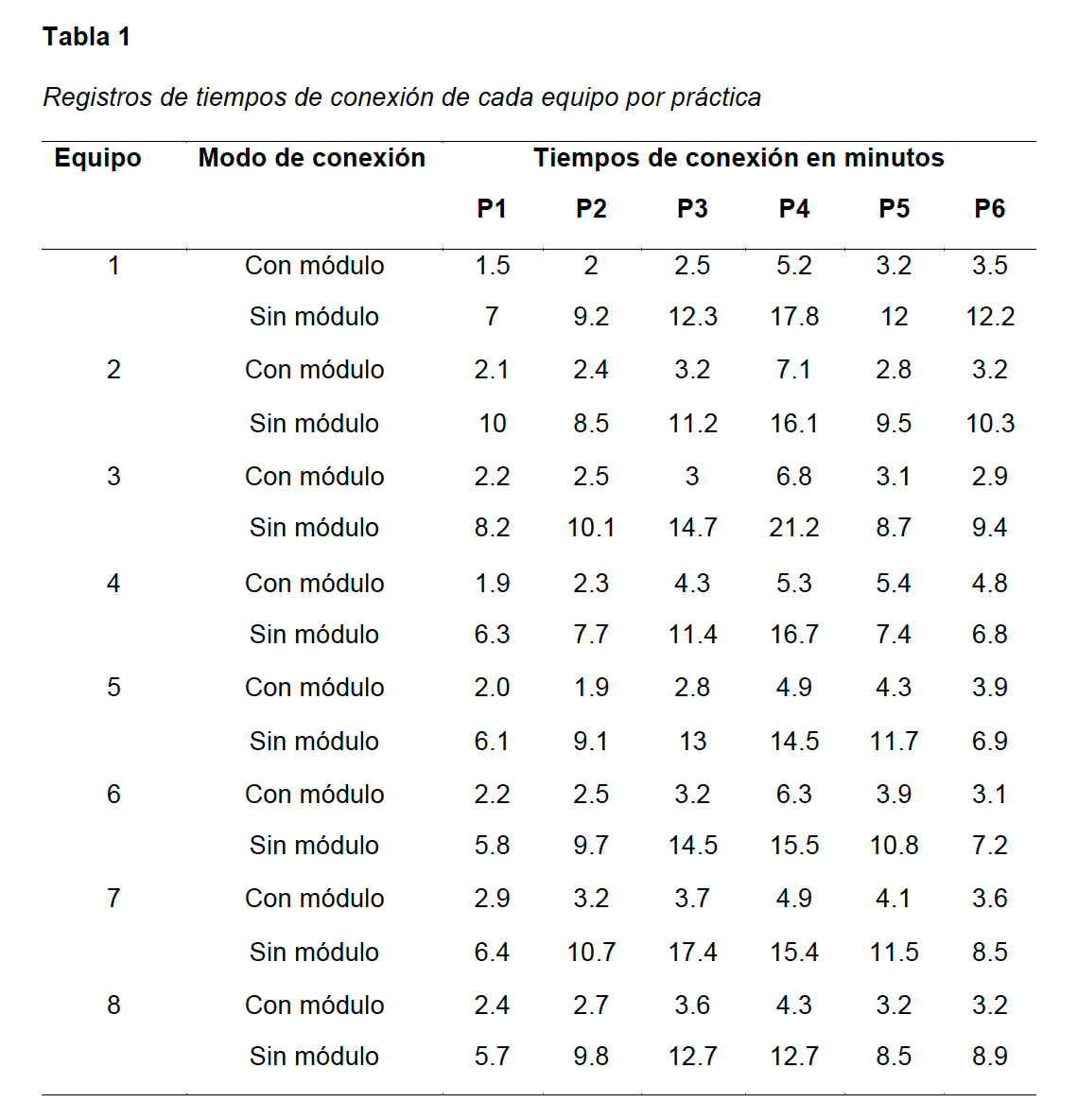
Con base a los diseños se elaboraron los prototipos para la realización de las prácticas, de las cuales en UTGZ no se registraron los tiempos de conexión, pero se observó la eficacia de la implementación de módulo. Con el prototipo 2 desarrollado en UTSMA, tampoco se hicieron registros de tiempo, pero el módulo fue de gran ayuda pues en tiempo de pandemia facilitaba su transporte para que cada alumno trabajara desde casa y lograr el saber hacer durante las clases a distancia. Finalmente, en UPPE se realizó el registro de tiempos de conexión de seis prácticas propuestas: paro y arranque de motor, paro y arranque de motor con enclavamiento, uso de relevador para control de lámparas piloto, paro y arranque de motor con lámparas indicadoras, uso de temporizador con retardo a la desconexión de motor, uso de temporizador con retardo a la conexión de motor. La conexión entre componentes se hacía a través de cables tipo banana, como se aprecia en la figura 3.
Para realizar la comparación de tiempos de conexión y desconexión de cada práctica se formaron 7 equipos de 3 integrantes y uno de cuatro, con estudiantes de sexto cuatrimestre de Ingeniería Mecatrónica. Se realizaron las seis prácticas con y sin módulo obteniendo los resultados de tiempo promedio que se muestran en la tabla 1.
Se realizó el cálculo de promedio de tiempos de cada práctica con y sin módulo, tal y como se aprecia en la tabla 2, en ella se observa también el porcentaje que se redujo en tiempos de conexión, alcanzando en algunas prácticas una disminución de hasta 75%
Conclusiones
Con el desarrollo del módulo para la enseñanza de control de motores se observa su eficacia en la reducción de tiempos, siendo esta de hasta un 75% lo que significa que más alumnos tienen la posibilidad de realizar las prácticas en el tiempo destinado a clases, se reducen costos pues se evitan daños en los componentes por tornillos barridos, gasto en cable y cinta de aislar para conexiones. Además, se logró observar que en pandemia fue de gran ayuda pues por sus dimensiones hace que sea de fácil transporte a diferencia de los existentes en el mercado, que son pesados y grandes.
El tercer módulo es similar al segundo módulo creado y actualmente se trabaja en el prototipo final que permitirá la realización de al menos 15 prácticas, incluyendo inversión de giro de motor trifásico.
Por ende, se concluye que la creación de este módulo de enseñanza cumplió con el objetivo con el que fue diseñado, el cual es facilitar la enseñanza en los estudiantes de las universidades tecnológicas y politécnicas donde se imparten las materias de control de motores y máquinas eléctricas.
Referencias
- Erickson, R. W. (2020). Diseño de sistemas de control de motores. Springer. DOI: 10.1007/978-3-030-44233-9
- IEEE. (2020). Diccionario de términos electromecánicos. IEEE Press. DOI: 10.1109/IEEESTD.2020.9135399
- Mendoza, J. (s.f.). José De Jesús Mendoza [Canal de YouTube]. Recuperado de https://youtube.com/@josedejesusmendoza5255?si=yQW9cSALMsHGYWGk